Projects List
- Soft nonholonomic constraints: Theory and applications to optimal control
- Design and Modeling of a Novel Single-Actuator Differentially Driven Robot
- Depth estimation from edge and blur estimation
- Occlusion detection & handling in monocular SLAM
- Autonomous Underwater Vehicle for Monitoring of Maritime Pollution
- Teleoperation of UAV with Haptic Feedback
- Advanced Control Strategies for Unmanned Aerial Vehicles
- Ground Vehicles Driver Assistance and Active Safety Control Systems
- Pedestrian Detection
- Towards Fully Autonomous Self-Supervised Free Space Estimation
- Object-Oriented Structure from Motion
- Humanoid Fall Avoidance
Object-Oriented Structure from Motion
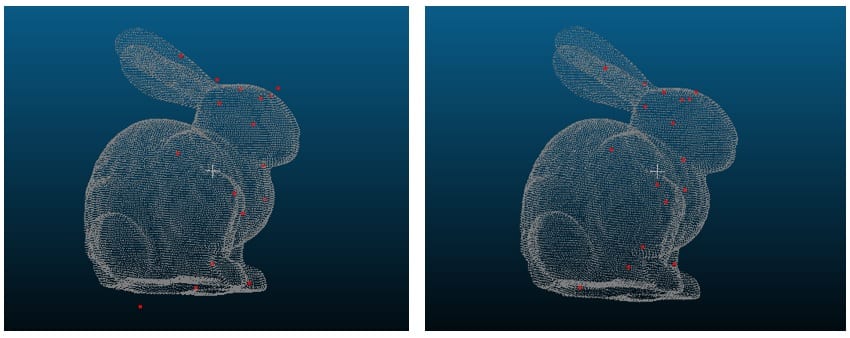

One popular approach to 3D reconstruction, which relies on a monocular camera, is what is well-known as Structure from Motion (SfM). Starting from 2D images of a scene, SfM recovers both the scene structure and the camera trajectory inside it. In spite of the significant progress achieved in SfM in the past decades, the structures that are obtained still lack the quality of the reconstruction obtained through laser scanning of objects for example, and in many cases require manual labor-intensive post-processing of the point cloud before they can be used in practice. The aim of our research is, using a minimal amount of input from the user, to improve the structure estimation part of SfM by treating points in the scene non-uniformly, whereby the major focus would be on pertinent objects in the scene, leading to what we call Object-Oriented SfM.
By: Rahaf Rahal